Behaviour Planner (Intersection scenario), Reactive path planner (Polynomial Spirals planner, Lattice Planner, Optimization), Velocity profile Generator (Trapezoidal Profile + Linear ramp profil)
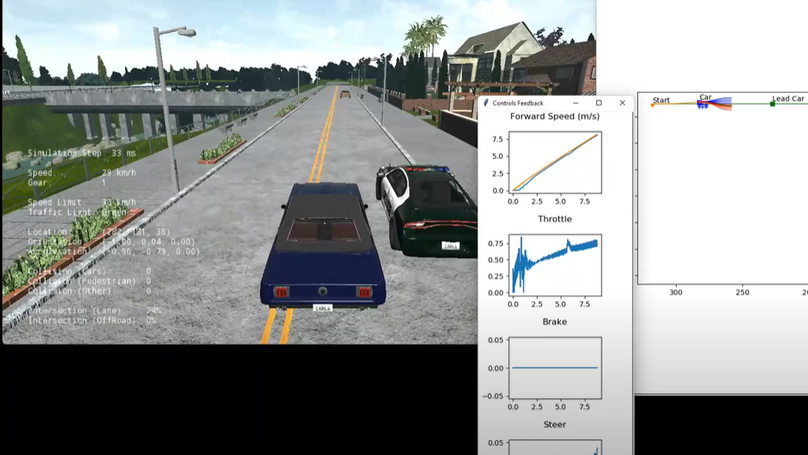
In modern transportation system, lane-following motion control is the first-step of self-driving car on road.
A Deep Q network-based lane change supervisor and local lane change controller design
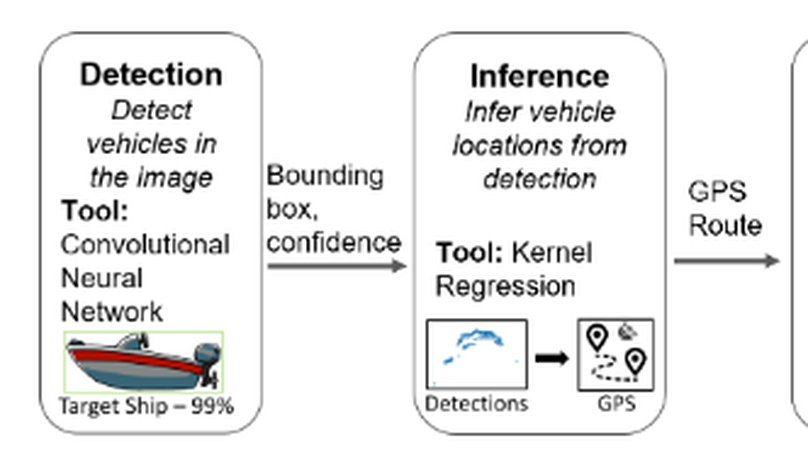
Multi-Model learning for smooth Georeferenced Tracking from an Uncalibrated Monocular Camera.
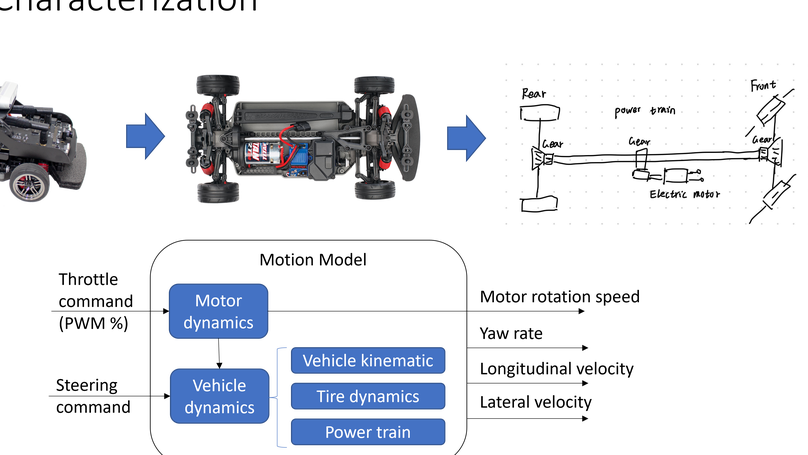
Model characterization of vehicle must contain errors in dynamical parameters. The parameter error cause inaccurate state estimation from sensors. I am presenting an idea of using Extended Kalman filter to estimate states and parameter simultaneously to produce more accurate state estimation under parameter error.
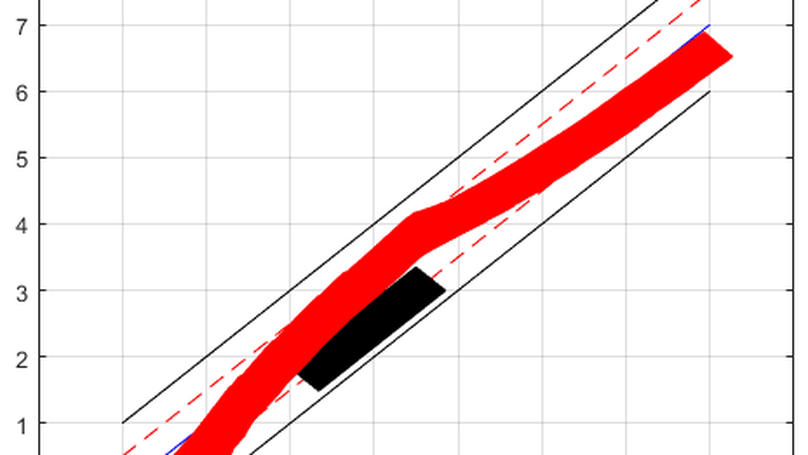
A Moving-horizon Quadratic Filter design produces smoother estimation of derivatives of signals than Kalman Filter
Model motion dynamics and estimation parameters.
Driving and Racing through a remote cockpit
Robust concensus control for multi-agents system in presence of external disturbance and model parameter uncertainty.